What are the different types of end effectors?
The end effector (also known as end-of-arm tooling) is arguably the most important component in a robotic arm. Without the end effector, a robot arm can’t actually perform any tasks. Whether it’s a gripper, welding torch, camera, or something else entirely, end effectors are the component that allows a robot arm to accomplish its task.
With the increased adoption of robotic arms as an automation solution, it’s more important than ever to understand the ins and outs of end effectors, which is exactly what this blog is going to cover.
What is an end effector?
An end effector is the component attached to the "wrist" of a robotic arm. End effectors are what allow robot arms to perform their tasks. There are numerous different types of end effectors, all geared towards different tasks.
What are the different types of end effectors?
End effectors are most commonly split up into three main categories: grippers, process tools, and sensors. Each of these has their own sub-categories, but first it’s important to understand the differences between these first three categories.
Grippers
Robot arm grippers are by far the most widely used and recognized end effectors due to their versatility across applications and relatively low cost on average compared to other types of end effectors.
Grippers are also to grab and manipulate objects, making them the go-to solution for automated pick & place, material handling, and assembly tasks. However, these are just a few of the total possible applications for grippers.
Even under the umbrella of grippers, there are many different types that each perform their task in unique ways. These include:
- Mechanical grippers: use jaws or fingers actuated by a mechanism — either electric, pneumatic, or hydraulic — to physically grasp objects.
- Magnetic grippers: employ an electromagnet or permanent magnet to hold ferromagnetic materials.
- Vacuum grippers: utilize suction cups connected to a vacuum pump to lift and manipulate objects.
Process Tools
The easiest way to think about process tool end effectors is in relation to grippers. Grippers handle and move objects, while process tools physically change them. Countless process tools can be used in industrial applications — some of the most common are:

- Dosing syringes: can be used to dispense medications or apply glue to workpieces with unmatched accuracy.
- Welding torches: a common process tool, widely used across various industries and applications — even in robotic underwater welding.
- Spray paint guns: allow a robot to quickly and evenly paint a workpiece. These are often found in automotive or appliance manufacturing.
Sensors
Sensors in robotic arms can either be used as a standalone end effector, or as a supporting component for an end effector. Sensors can provide the robot with information about proximity to other objects, applied forces, light levels, and more. Different types of robot sensors include:
- Cameras that can inspect products for defects, assist in product positioning and orientation, and obstacle avoidance in the case of mobile robots.
- Force sensors that can be integrated with grippers and process tools to sense the force being used on a product, helping prevent damage.
- Light sensors that measure light levels and assist in detecting the position and orientation of products in low-light areas.
When acting in support of an end effector, sensors still find extensive use. In the case of grippers, force sensors can measure pressure in pneumatic and hydraulic systems, as well as detect leakages or other problems as they occur. Various vision systems like range sensors, cameras, and magnetic sensors can all feed information to a robot that allows it to operate more effectively and interact with products more accurately.
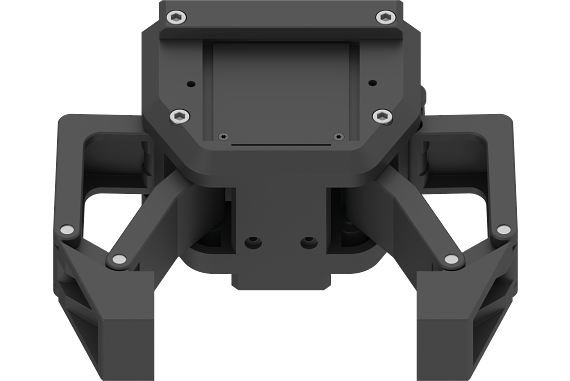
3D printed grippers
While many different gripper variants exist, there’s no shortage of custom applications where a more unique gripper is necessary. In cases such as these, 3D printed grippers are an option to consider since 3D printing introduces the possibility to create complex geometries that are not normally possible with injection molding or machining. 3D printed plastic grippers are also lighter and more cost-effective than conventional metal grippers.

Carecos Kosmetik GmbH is a perfect example of a 3D printed gripper success story. They made the switch from machined aluminum grippers to 3D printed grippers from igus due to the exorbitant costs and delivery times of the aluminum grippers. The 3D printed grippers not only were 85% cheaper and delivered 70% faster, but provided stable, long-lasting performance.
End effector compatibility
Even if you’ve done your research into robotic end effectors and have determined the best one for your application, there’s still the matter of installing it onto the robotic arm. Questions of compatibility may arise, and can throw a wrench into the entire process if the arm and end effector aren’t compatible. However, a robotics marketplace exists that takes this problem out of the equation entirely: RBTX.
RBTX is a marketplace for fully-assembled robotic solutions — as well as individual components — from a wide range of well-known manufacturers. But, even with all these options in one place, the question still remains: how does any of this help with the compatibility of end effectors? The answer is a built-in robot configurator that only allows compatible components to be combined, eliminating the risk of ordering an end effector that isn’t compatible with the arm itself.
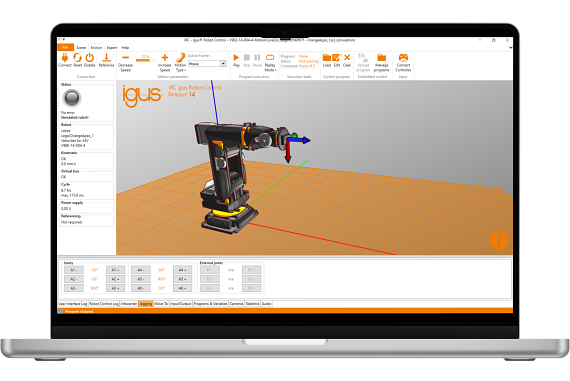
Programming robotic arms & end effectors
So now you’ve put together your robotic arm and end effector, and you’re ready to program the robot. But what if you don’t have the programming knowledge needed to accomplish such a task, or simply don’t have the time for extensive coding? Thankfully, the igus Robot Controller (iRC) software makes it easy to program your robot from scratch even without in-depth programming knowledge. An intuitive user interface and high level of compatibility — gantry robots, delta robots, SCARA robots, and robotic arms of varying axes can all be programmed with iRC — ensure ease of use across numerous applications.
With iRC, grippers can be programmed at the same time as the robotic arm, further simplifying the process. Similar to robotic arms, iRC is compatible with numerous different types of grippers, including those available on the RBTX marketplace.
Conclusion
Robot end effectors can be a complicated topic regardless of how you approach it. However, hopefully after reading this blog you have a better understanding of the topic, and are ready to move forward with your own robotic applications.
Frequently Asked Questions
A robot end effector (or end-of-arm tooling, EOAT) is the device at the end of a robotic arm, designed to interact with the environment. It is essentially the robot's "hand," performing the specific task the robot was programmed for, such as gripping, welding, painting, or inspecting.
The three primary classifications are
The most important factor is the application requirements, which include:
The end effector must be capable of handling the object reliably and performing the required action with the necessary precision and force.
Compliance refers to the end effector's ability to tolerate or adjust to slight variations, misalignments, or errors in the position of the workpiece. It can be achieved passively through flexible mounting or actively through force/torque sensing. Compliance is vital for tasks like inserting a peg into a hole or assembly, where rigid contact could cause jams, damage, or failure; it allows the tool to "give" slightly to find the correct alignment.
Common actuation methods for grippers include:
A quick changer (or tool changer) is a mechanism that allows a robot to automatically swap between different end effectors without human intervention. This is crucial for applications where a single robot needs to perform multiple, different tasks (e.g., pick up a part with a gripper, then weld it with a welding gun). It significantly increases robot versatility and utilization.
The weight of the end effector directly reduces the payload capacity of the robot arm. A heavier end effector means the robot can carry less weight in the actual workpiece. For example, if a robot has a 10 kg payload limit and the end effector weighs 3 kg, the maximum object weight it can manipulate is only 7 kg. Weight is a critical consideration for maximizing the robot's utility.
Yes. Modern end effectors often incorporate sensors and advanced controls, making them "smart."