Understand industrial robot types: a guide to selection & use
Original article by Avory Brookins
Automating laborious tasks can help save time, increase production and improve the quality of your products. But before giving automation a go, it’s important to know the difference between the industrial robots on the market. This blog post provides a brief overview of six of them: Gantry, delta, polar, robot arms, cobots, and SCARA. You’ll learn how they work, their suitable applications, and how to choose the robot that's right for you.
1. Cartesian and Gantry Robots
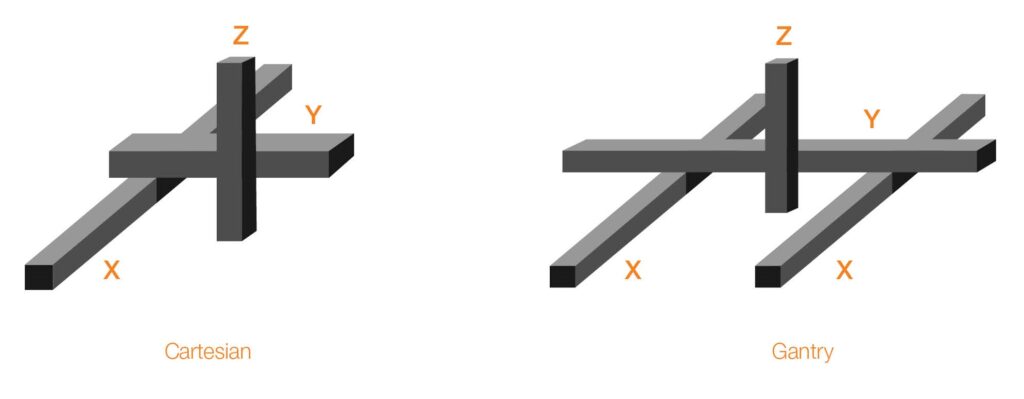
People often think Cartesian and gantry robots are the same or that their names are interchangeable – but that’s not the case. It’s true that they’re both linear robots, but each one falls into its own category because of their axis configurations.
Typically, Cartesians have a base X axis, a cantilevered Y axis, and/or a Z axis that move up and down, in and out, and side to side. Gantries, however, are configured with two base X axes, a supported Y axis that spans across the two X axes, and an optional cantilevered Z axis. Each robot requires a mounting frame, unlike other types of industrial robots such as deltas and robotic arms.
Because they’re highly configurable, Cartesian and gantry robots are commonly used for numerous industrial applications, including pick and place, sorting, labeling, measurement, inspection automation and repetitive material handling. You can adjust their precision, speed, stroke length and size, and add almost any type of linear actuator with any variety of drive mechanisms. Gantries can handle larger payloads and much longer stroke lengths since the Y axis is supported.
2. Polar Robots
Polar robots, also referred to as spherical robots consist of a base with a twisting joint and an arm with a linear joint and two rotary joints. This configuration creates a wide spherical workspace around the robot. Polar robots are the oldest industrial robot type as the first ever industrial robot, Unimate, was a spherical robot used within a General Motors assembly line.
Polar robots are ideal in applications with frequent circular motion such as welding, painting, and assembly tasks due to the arm’s rotary joints. Polar robots are also highly accurate and offer excellent repeatability, making them an even better choice for these applications.

There are a few key drawbacks with polar robots, including their reduced payload compared to other types of industrial robots, the large amount of space they require to operate, and the relatively complex programming required due to the use of polar coordinates.
Though polar robots kicked off the use of industrial robots, they have been largely replaced by SCARA robots and multi-axis robotic arms. SCARA robots offer a similar range of movement, but are simpler to program and move faster than polar robots. Robotic arms are an even more popular alternative due to higher payload capabilities, better scalability, and more application flexibility.
3. SCARA
SCARA stands for selective compliance assembly robot arm or selective compliance articulated robot arm. Most SCARA robots have four degrees of freedom that allow for movement along the X, Y, and Z axes. A full 360-degree range of motion around the Z axis is possible, creating a cylindrical workspace around the robot.
The term “selective compliance” in the SCARA’s name refers to the flexibility of the robot’s axes. The X and Y axes are flexible which allows for dynamic movements, whereas the Z axis is rigid due to being fixed. Since only some axes are flexible — or compliant, in this case — a SCARA is considered to have selective compliance. While selective compliance limits the adaptability of a SCARA, the precision of a SCARA wouldn’t be possible without it.

While not as fast as a delta robot, SCARAs are still known for their speed and offer superior precision over deltas and other types of robots. Additionally, SCARAs are more affordable than any other robot type due to their small form factor and relatively few axes.
Assembly and pick and place applications are the most popular for SCARA robots, particularly in the electronics and medical industries where high precision and repeatability are vital. Other common applications for SCARA robots include dispensing, small-scale 3D printing, and engraving.
4. Delta Robot
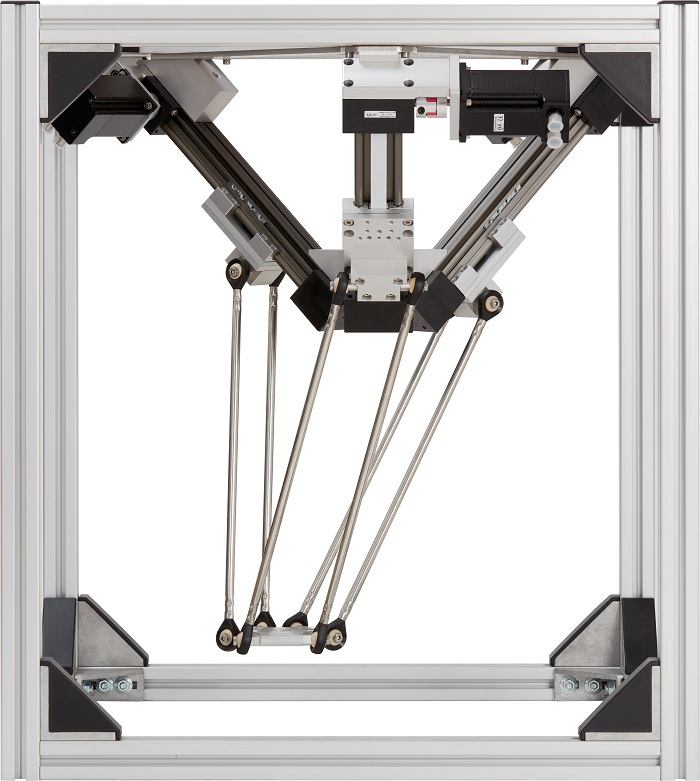
Delta robots, also called parallel or spider robots, consist primarily of three jointed parallelogram arms and a single base. The arms are connected to the base at one end, and a tooling plate at the other, where the end effector is also attached. The base is mounted above the work area while the arms move with the help of motors on each axis.
The linear movement of each arm creates a dome-shaped workspace under the base of the delta. Due to the placement of the motors on the base of the robot rather than each arm individually, delta robots are able to achieve exceptionally high speeds (i.e. 60+ picks per minute). This speed, however, comes at the cost of payload. Delta robots typically have a maximum payload of around 5kg, limiting their application potential.
Deltas are ideal for light-duty pick-and-place tasks in the food, electronics and pharmaceutical industries. When equipped with a vision system, they can also be used for automated sorting applications across a wide array of industries.
5. Robotic Arms
Robotic arms, or articulated robots, are fixed to a base with a rotating joint. The arms can be designed with up to 10 rotary joints that act as axes but typically only feature 4-6. Each additional axis enables more motion.
Articulated robots are perfect for complex movements, such as reaching under something to grab a part, because they move like human arms. They can also pitch, roll and yaw, which allows for more directional control than SCARA robots. Robotic arms are used for arc welding, material handling, assembly, packaging, machine tending and palletizing.
They have a predesigned reach and accuracy ratings that make it easier to establish their repeatability of movement (Richard Vaughn). However, unlike Cartesian and gantry robots, you’re locked into those design features once you buy it. Robotic arms could also cost more because of expensive features like proprietary controllers.
6. Collaborative Robots (Cobots)
Cobots are similar to robotic arms, with the key difference of being designed to work collaboratively alongside humans in the same workspace. To achieve this safely, cobots utilize features like sensors for force and torque that allow the cobot to detect contact with humans or other objects and respond accordingly. Cobots are also often designed with extra padding and rounded edges to reduce injury risk in the case of contact with a human worker.

Cobots need to be more adaptable than a standard robotic arm due to working alongside humans, meaning they often have a smaller footprint and require less complex programming knowledge than a standard robot arm. They also tend to operate at lower speeds and payloads, once again to promote the safety of any workers working alongside the cobot.
Since cobots generally are not designed to be a heavy-duty industrial solution like robot arms, they fill a slightly different set of applications. Applications requiring precision and adaptability — primarily assembly and inspection tasks — are where cobots shine, as opposed to tasks like material handling, welding, or palletizing that robot arms are preferred for.
Blog: What is a cobot?
Which is the best robot to choose?
According to Vaughn, it’s important to evaluate the needs of your application by profiling the job's load, orientation, speed, travel, precision, environment and duty cycle.
Load: A robot’s maximum load capacity (typically included in the robot’s part number) must be greater than the total weight of the payload at the end of the robot’s arm (Cross Company). Sensors, grippers, brackets or any other tooling should be factored into the payload. If the payload is too close or equal to the robot’s maximum load capacity, it can degrade accuracy.
Orientation: How restrictive is the work area? That will determine if your robot needs to be mounted on the floor, overhead, etc.
Speed and travel: Vaughn says for pick-and-place applications, take into account acceleration times over significant distances. He says Cartesian robots, for example, can accelerate at 5m/sec or more and can be customized with belt, linear motor or ball-screw actuators to enhance their speed and distance.
Precision: Some robots are designed with predefined accuracy ratings while others can be upgraded with new linear actuators after they are purchased.
Environment: If the working environment is dirty or dusty, covers and high-performance seals are available for SCARA, articulated and Cartesian robots. Additionally, all robot types can be designed for use in clean rooms.
Duty cycle: This is the amount of time it takes for a robot to move out and back (Cross Company). Robots that run 24/7 reach the end of their service life sooner than robots running only eight hours a day, five days a week. Vaughn recommends purchasing robots with long lubrication intervals and low-maintenance requirements to avoid future issues.
igus® offers gantry, delta, four and five-axis robot arms and six-axis cobots with self-lubricating components that are maintenance-free and resistant to dirt, dust, and corrosion. Visit igus.com for more information.
Sources:
1.) https://www.machinedesign.com/motion-control/difference-between-cartesian-six-axis-and-scara-robots
2.) https://www.processsolutions.com/what-are-the-different-types-of-industrial-robots-and-their-applications/
3.) https://www.kellertechnology.com/blog/how-to-use-4-types-of-industrial-robots-to-your-advantage/
4.) https://www.linearmotiontips.com/what-is-a-cartesian-robot/
5.) https://www.crossco.com/resources/technical-bulletins-guides/robotics-101-6-axis-vs-scara-vs-delta-vs-collaborative/


